1. pl端的encoder模块实现了可选的外部复位信号 2. pl端修改encoder模块的ENCODER_CR寄存器复位值,为仅限内部复位以及内部默认处于复位状态 3. 驱动层实现外部复位的开启和关闭功能,驱动open时退出默认的复位清零状态 由于驱动程序已在open时退出复位状态,应用程序可不做更改,驱动程序close后不会自动切换回复位状态 4. 更新了驱动测试应用程序
4.3 KiB
下位机
下位机按上位机指令根据传送带脉冲等触发相机,完成刨花板的缺陷分选任务。本次下位机不连接阀板,是由PLC翻板机的机械装置作为执行器,对木板进行分选。采用的硬件是Microphase的XME0724CB ZYNQ开发板,具体核心板型号为XME0724-10,到手后记得把各排插针焊一下,如左图:
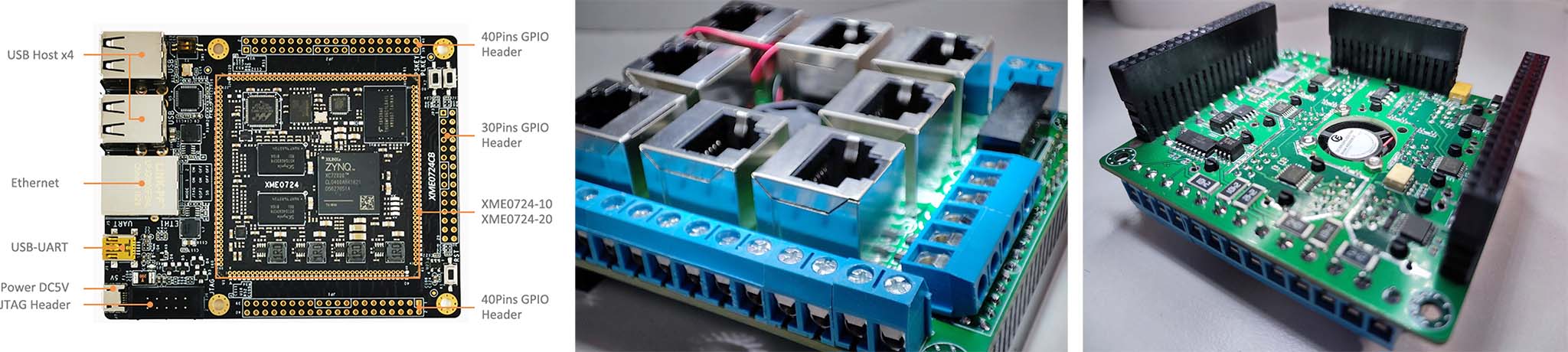
为了供电稳定,采用叠板给底板5V供电,由底板输出3.3V供回给叠板,叠板就是IO扩展板,将IO扩展板插在底板排针上,叠起来,因此称为叠板,如上图中和上图右。
IO扩展版提供了
- 1个12V电源输入
- 4个相机触发,本次项目为2个相机触发,其余冗余
- 1个ZYNQ散热风扇接口
- 6个编码器或IO输入,本次项目为1个编码器输入、1个物体传感器输入,其余冗余
- 8个阀板接口,本次项目没有用到
接线时,12V电源连接到IO扩展板的电源接口,阀板从左到右应连接在阀板接口1~6上,相机线应连接相机触发接口TRIG1和对应的GND接口,编码器线应连接在编码器输入接口E1和对应的GND接口。注意底板不连接任何外部电源。
开发和部署说明见doc/develop_and_deploy.md
目录结构
-
doc为说明文档,包括开发和部署细节、硬件设计的描述等
- develop_and_deploy.md为开发和部署说明,首先看这个文档
- hardware_description.md为PL端逻辑设计说明,阐述了硬件工作的整体流程
- pl_reference_mannual.md为PL端逻辑在AXI总线上映射的寄存器参考手册
-
script为配置系统、安装环境、安装可执行文件、卸载可执行文件等的脚本
关于脚本的使用,见doc/develop_and_deploy.md
-
target.sh为嵌入式linux中自动启动应用程序脚本
-
load*.sh为嵌入式linux中加载驱动的脚本
-
.bashrc为嵌入式linux中配置环境变量的脚本
-
-
protocol为上位机和下位机通信的协议
-
hardware下位机主板、接口板、底板等的硬件设计
- pl_platform为PL端硬件设计
- xme0724ioextend为IO叠板的原理图和PCB
-
source为XME0724板子上运行的源程序
- liunx_app为Linux上运行的应用程序,即业务逻辑
- linux_driver为Linux上的驱动,用于控制自定义的PL端硬件,其中drv_test结尾的目录为相应驱动模块的测试应用程序
- petalinux_config为petalinux工具在编译u-boot、kernel、rootfs前进行的配置
- petalinux_devicetree为本次自定义的Linux设备树文件部分,其余设备树为自动生成的
- petalinux_hwdescription为petalinux所使用的硬件描述文件,包含了vivado工程中的比特流等信息
版本
由于经常有不同类型的新要求出现,比如分选糖果、分选烟梗、同为糖果也具有不同的参数,因此不同的下位机型号(注意不是更新,比如同一台机器需要设置新的参数)应建立不同的分支,主分支无实际意义
分支命名规则(不使用中文,小写无空格)
b分支编号-p生产环境项目名-t分选对象[-其他特点1[-其他特点2...]]
中括号在这里表示可省略的项,中括号本身不应出现在实际命名中,其他特点应字母打头,可有多个,"-"相连
使用Git的tag功能定义版本(注意连着tag一起push),Github仓库的release功能同步发布最新版本
版本号遵循定义如下(不使用中文,小写无空格)
b分支编号-d文档版本-hPCB设计版本-lFPGA设计版本-p协议版本-s脚本版本-aAPP代码版本-i驱动版本-c系统编译配置版本-e设备树版本
分支编号和分支命名中编号一致。各部分版本应在相应目录下创建文件注明,比如2.1版本的PCB设计:PCB工程目录中建立version文本文件,内容为文本2.1。对于涉及整体设计的大改动版本号加1,其余改动版本号加0.1。每个分支的版本各自独立,新分支的版本从1.0起计算
作者
作者觉得还是不说明作者是谁比较好,免得毕业后有提着示波器的师弟师妹来问问题