# PL 端自定义外设参考手册
## 存储器和总线架构
### 系统架构
PL端主要由2个外设组成,分别时**风扇控制器**(FAN),**编码和分频控制器**(ENCODER)。各个控制器的连接关系如下图所示。

2个外设由统一的同步时钟驱动,时钟源来自PS端,为200MHz,软件不可修改。外部编码器信号和物体传感器信号输入**编码和分频控制器**,控制器根据软件设置的相机触发分频值对编码器信号进行分频。为同步触发相机。
具体的硬件设计和信号说明见[doc/hardware_description.md](hardware_description.md)
各控制器的边界地址和所属总线等信息如下表所示
| 边界地址 | 外设 | 总线 |
| ----------------------- | ---------------- | --------- |
| 0x43c10000 - 0x43c1ffff | 编码和分频控制器 | M_AXI_GP0 |
| 0x43c20000 - 0x43c2ffff | 风扇控制器 | M_AXI_GP0 |
## 风扇控制器 (FAN)
### FAN简介
FAN模块用于控 制散热风扇的启停以及通过PWM调整风扇速度。通过对寄存器写入值,该模块能正常启停散热风扇,但由于代码与硬件兼容问题,导致无法观察到调速现象。
### FAN主要特性
- 能控制风扇的启停
- 自定义占空比,调整风扇转速
### FAN功能说明
 通过将开启使能拉高,开启风扇。通过向风速寄存器写入PWM占空值,控制风扇减少或提高风速。
### FAN寄存器说明
FAN模块寄存器主要包括控制寄存器 (FAN_CR)、风速寄存器 (FAN_SPDR)。控制寄存器 (FAN_CR)用于控制风扇开启或关闭的状态,风速寄存器 (FAN_SPDR)通过PWM技术设置风扇转动的速度。
**Base Address: 0x43c20000**
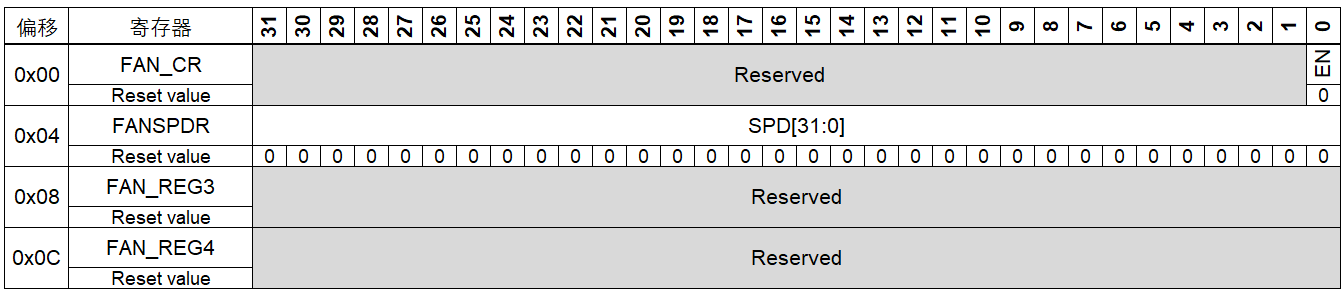
#### FAN控制寄存器 (FAN_CR)
偏移地址: 0x00
通过将开启使能拉高,开启风扇。通过向风速寄存器写入PWM占空值,控制风扇减少或提高风速。
### FAN寄存器说明
FAN模块寄存器主要包括控制寄存器 (FAN_CR)、风速寄存器 (FAN_SPDR)。控制寄存器 (FAN_CR)用于控制风扇开启或关闭的状态,风速寄存器 (FAN_SPDR)通过PWM技术设置风扇转动的速度。
**Base Address: 0x43c20000**
#### FAN控制寄存器 (FAN_CR)
偏移地址: 0x00
复位值: 0x0000 0000

| **Field** | **Description** |
| :----------- | :----------------------------------------------------------- |
| 位31:16 保留 | 必须保持复位值 |
| 位0 **EN** | 内部触发信号 (Virtual Triggle Signal)
0: 停止风扇
1: 开启风扇 |
#### FAN风速寄存器 (FAN_SPDR)
偏移地址: 0x04
复位值: 0x0000 0000

| **Field** | **Description** |
| :------------- | :----------------------------------------------------------- |
| 位31:0 **SPD** | 该寄存器值表示设置的风扇PWM占空值,占空比转换公式如下。
占空比% = SPD / (2 ^ 32 - 1) * 100% |
#### FAN寄存器映射
FAN寄存器可映射为32位可寻址寄存器,如下表所述:
## 编码和分频控制器 (ENCODER)
### ENCODER简介
ENCODER模块主要用于实现编码器计数以及对编码器脉冲进行分频,分频后的脉冲信号输出给相机。该模块包括1个控制寄存器 (ENCODER_CR)、阀触发分频寄存器 (ENCODER_VDIVR)、相机触发分频寄存器 (ENCODER_CDIVR)。
### ENCODER主要特性
- 独立设置对相机和喷阀的分频系数
- 内外两种触发模式选择
- 可选的外部清零方式
### ENCODER功能说明
下图给出了ENCODER的主要信号:
 ENCODER模块接收编码器脉冲信号,通过设置的相机和喷阀分频系数,生成对应的触发信号。编码器脉冲信号可由内部或外部触发模式产生。
### ENCODER寄存器说明
ENCODER模块的寄存器主要有控制寄存器 (ENCODER_CR)、阀触发分频寄存器 (ENCODER_VDIVR)和相机触发分频寄存器 (ENCODER_CDIVR)。控制寄存器 (ENCODER_CR)用于进行触发模式选择以及复位清空,阀触发分频寄存器 (ENCODER_VDIVR)用于寄存输入的分频系数,将编码器脉冲除以分频系数得到触发脉冲。
**Base Address: 0x43c10000**
#### ENCODER控制寄存器 (ENCODER_CR)
偏移地址: 0x00
ENCODER模块接收编码器脉冲信号,通过设置的相机和喷阀分频系数,生成对应的触发信号。编码器脉冲信号可由内部或外部触发模式产生。
### ENCODER寄存器说明
ENCODER模块的寄存器主要有控制寄存器 (ENCODER_CR)、阀触发分频寄存器 (ENCODER_VDIVR)和相机触发分频寄存器 (ENCODER_CDIVR)。控制寄存器 (ENCODER_CR)用于进行触发模式选择以及复位清空,阀触发分频寄存器 (ENCODER_VDIVR)用于寄存输入的分频系数,将编码器脉冲除以分频系数得到触发脉冲。
**Base Address: 0x43c10000**
#### ENCODER控制寄存器 (ENCODER_CR)
偏移地址: 0x00
复位值: 0x0000 0008

| **Field** | **Description** |
| :---------- | :----------------------------------------------------------- |
| 位31:4 保留 | 必须保持复位值 |
| 位3 **ICO** | 仅限内部清除缓存 (Internal Clear Only)
0: 同时允许由外部输入**Ex CLR**和清除缓存位**CLR**控制进入清零状态
清零状态见位**CLR**的描述;外部输入为高时,退出清零状态
1: 仅限内部信号清除缓存 |
| 位2 **VTS** | 内部触发信号 (Virtual Triggle Signal)
**MOD**位置1时,由软件写入,将该位信号直接充当触发信号
0: 低电平
1: 高电平 |
| 位1 **MOD** | 模式选择 (Mode)
0: 外部触发模式,外部触发编码器转动
1: 内部触发模式,软件模拟触发信号 |
| 位0 **CLR** | 清除缓存 (Clear)
0: 清除编码和分频控制器内部的分频计数值,不影响ENCODER_VDIVR和ENCODER_CDIVRx
注意: 程序清零该位后需再写入1,使计数器退出清零状态,正常工作
1: 正常工作 |
#### ENCODER阀触发分频寄存器 (ENCODER_VDIVR)
偏移地址: 0x04
复位值: 0x0000 0000

| **Field** | **Description** |
| :-------------- | :----------------------------------------------------------- |
| 位31:0 **VDIV** | 阀触发分频值
阀控制器重采样频率和编码器脉冲的分频值, 写入数据后编码和分频控制器自动清除缓存并应用新的数值
注意:0表示不间断触发,即PL端每个时钟周期均触发阀模块 |
#### ENCODER相机触发分频寄存器 (ENCODER_CDIVRx) (x=A...D)
用于设定相机A到相机D的分频系数,各相机可独立设置
偏移地址: 0x08
复位值: 0x0000 0000

| **Field** | **Description** |
| :-------------- | :----------------------------------------------------------- |
| 位31:0 **CDIV** | 相机触发分频值
写入数据后编码和分频控制器自动清除缓存并应用新的数值
注意:0表示不间断触发,即PL端每个时钟周期均触发相机 |
#### ENCODER寄存器映射
ENCODER寄存器可映射为32位可寻址寄存器,如下表所述:
